20Jun
The Illusion of Full Autonomy
Self-driving cars have been promised as the future of urban mobility for over a decade. Tech companies like Waymo, Cruise, and Tesla have poured billions into developing autonomous vehicles (AVs), insisting that widespread adoption is just around the corner. Yet, despite flashy demos and controlled test environments, the dream of fully driverless cars navigating chaotic city streets remains exactly that—a dream.
The reality is that cities are messy, unpredictable, and filled with variables that no AI system can fully comprehend. From jaywalking pedestrians to erratic cyclists, from construction zones to ambiguous traffic signals, urban environments present an infinite number of edge cases that stump even the most advanced autonomous systems.
And while AVs might eventually work in structured, low-complexity environments like highways or suburban neighborhoods, the idea that they’ll ever master city driving is a fantasy. Here’s why.
The Pedestrian Problem: Humans Don’t Follow The Rules
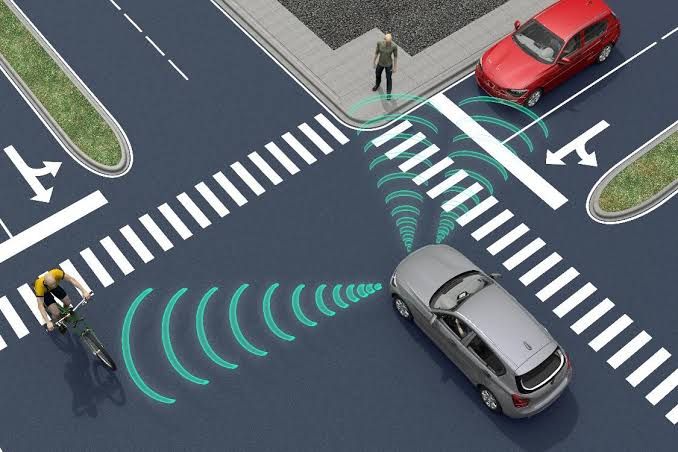
One of the biggest hurdles for autonomous vehicles is human unpredictability. Unlike robots, people don’t move in perfectly logical, rule-following patterns. They jaywalk, dart into traffic, wave cars through intersections erratically, and make split-second decisions based on eye contact and instinct—something AI fundamentally cannot replicate.
It was a rainy afternoon in downtown Chicago when an autonomous vehicle approached a four-way stop, sensors dialed in, lidar sweeping. Just then, an elderly woman stepped off the curb without looking, umbrella wobbling, completely unaware the walk signal hadn’t changed. A human driver might have rolled down the window, waved, shouted—anything. But the AV froze. Its systems flagged a “hazard” and stopped mid-intersection, causing traffic to bottleneck.
Behind her, a cyclist tried to squeeze through and swerved. A pedestrian from the other side hesitated, caught in a blur of flashing hazard lights and stalled logic. The machine couldn’t compute her intent. Was she crossing? Backing away? The AV needed certainty.
Humans thrive in ambiguity: AI does not. In moments like these, milliseconds count. But a machine, for all its precision, struggles with the simplest urban drama: a person with places to be and a mind that refuses to follow scripts.
In dense urban areas, driving is often more about interpreting subtle human cues than obeying traffic laws. A pedestrian might lock eyes with a driver and gesture to cross, even if they don’t have the right of way. A cyclist might weave through stopped cars at a red light. A delivery truck driver might double-park and expect others to navigate around them.
These are all scenarios where human drivers rely on intuition, social norms, and real-time adaptation. AVs, however, are rigidly programmed to follow rules. When faced with ambiguity, they either freeze (creating traffic hazards) or make unsafe assumptions (leading to accidents).
The "Edge Case" Fallacy
Autonomous car developers often talk about "edge cases", rare scenarios that their AI struggles to handle. But in cities, these so-called edge cases are the norm. A child chasing a ball into the street, a drunk pedestrian stumbling between cars, a food cart suddenly rolling into an intersection. These aren’t statistical anomalies; they’re daily urban life.
Tesla is yet to issue a direct public explanation regarding the recent incident where a Tesla Model Y, operating on its Full Self-Driving (FSD) software, struck a child-sized mannequin during a safety test conducted by The Dawn Project.
In the test, the vehicle recognized the mannequin as a pedestrian but failed to stop, even as it passed a stopped school bus with flashing lights and an extended stop sign.
Tesla’s general stance is that FSD (Supervised) is not fully autonomous and requires a fully attentive driver at all times. The company emphasizes that drivers must be ready to take control immediately, and that the system is still in beta testing. Critics argue this disclaimer doesn’t absolve Tesla of responsibility when the system fails in scenarios where human drivers would typically react.
The incident naturally reignited debate over the readiness of autonomous systems for real-world deployment, especially in unpredictable urban environments.
No amount of machine learning can account for every possible human behavior. And when an AV encounters something it doesn’t understand, the results can be deadly.
Infrastructure Chaos: Cities Aren’t Built For Robots

Even if autonomous cars could perfectly predict human behavior, they’d still face another insurmountable challenge: infrastructure. City streets are a patchwork of poorly maintained roads, faded lane markings, inconsistent signage, and temporary construction zones, all of which confuse AVs.
The Lane Marker Dilemma
Autonomous vehicles rely heavily on clear lane markings to navigate. In other words, they depend on a digital understanding of the physical world, and few elements are more essential to that than lane markings. But in real-world conditions, these lines are often unreliable.
In urban areas, constant wear from tires and weather can fade or erase them entirely. When rain pours or snow falls, even freshly painted lines disappear beneath a slick surface. Construction zones add further chaos; temporary signage and abrupt rerouting confuse not only humans but machines trained on consistency.
Add to this the crumbling infrastructure in many cities, where potholes and degraded roads lead to erratic swerving and off-center driving. Human drivers instinctively interpret these as necessary adjustments, but AVs struggle when the road defies their encoded expectations.
Without clear visual cues, even the most advanced systems can hesitate, drift, or disengage, revealing a stark truth: navigating a perfectly ordered digital map is far easier than decoding a disorderly world in motion.
Human drivers can adapt to these imperfections instinctively. AVs, however, often panic—either slamming on the brakes or veering dangerously when they lose track of lane boundaries.
Traffic Signals And Ambiguous Right-of-Way

City intersections are another nightmare for AVs. Unlike highways, where rules are clear and consistent, urban traffic flows are governed by a mix of signals, signs, and unwritten social rules. At four-way stops, for instance, humans use eye contact and gestures to negotiate who goes first. AVs freeze or act unpredictably.
Unprotected left turns? Judging gaps in oncoming traffic requires human intuition. AVs either hesitate too long or misjudge distances. Some cities have crosswalks where all traffic stops, and pedestrians can walk diagonally. AVs often fail to recognize these patterns.
Even something as simple as a flashing yellow light, which signals caution but not necessarily a full stop, can confuse autonomous systems.
The "AI Can’t Handle Weather" Problem
Rain, snow, fog, and glare all wreak havoc on AV sensors. Lidar (laser-based detection) struggles in heavy precipitation. Cameras are blinded by sun glare or obscured by dirt. Radar can be fooled by metallic road surfaces or large puddles.
There’s actually a growing body of research that confirms how adverse weather conditions impair autonomous vehicle (AV) sensors.
Studies show that in 25 mm/h rain, visibility for 905 nm lidar drops from 2 km to just 0.7 km, and for 1550 nm lidar, it drops to 0.45 km. Fog causes Mie scattering, which leads to signal attenuation and false positives.
Similarly, the AAA found that in simulated rain, 33% of test vehicles struck a static object, and 69% failed lane-keeping task—without issuing warnings.
While radar is more resilient, it can still be misled by metallic surfaces or large puddles, which reflect signals unpredictably. It also struggles to distinguish between pedestrians and static objects like aluminum cans. Sensor fusion is often used to mitigate these issues, but even combined systems can falter in extreme conditions.
To address weather-related blind spots, autonomous vehicle developers are pursuing a mix of hardware upgrades and smarter software, particularly multi-modal sensor fusion.
By blending inputs from lidar, radar, cameras, and even ultrasonic sensors, systems can cross-verify objects and road features. For example, radar might detect a vehicle obscured by fog that a camera can't see. All-weather lidar and thermal imaging are gaining traction for these same purposes.
New lidar systems with longer wavelengths (1550 nm) are being designed to better penetrate rain and fog. Meanwhile, thermal cameras, like those from FLIR, can detect living beings by body heat, helping in night driving or in visually impaired conditions.
AI-driven perception algorithms are being trained with massive datasets of bad-weather scenarios. Companies simulate millions of extreme environments—snowstorms, glare, deluges—to improve recognition accuracy and decision-making. Redundant cleaning systems now include lens heaters, wipers, hydrophobic coatings, and even compressed-air blowers to keep sensors clear.
Automakers are also leveraging high-definition mapping and V2X (vehicle-to-everything) communication for backup roles. Maps supply lane data when markings are invisible, while V2X lets vehicles “talk” to traffic lights, road signs, or even each other to share alerts when visibility is compromised.
Despite all this, perfection remains elusive. That’s why many experts believe human oversight or highly geo-fenced deployment in well-mapped, well-maintained areas will remain essential for the foreseeable future.
Real-World Failures

In San Francisco, Cruise AVs famously malfunctioned in fog, clustering together and blocking traffic. About 10 Cruise vehicles became immobilized and blocked traffic for roughly 15 minutes. The cause was attributed to connectivity issues, possibly worsened by fog and wireless congestion during a nearby music festival.
In Phoenix, Waymo cars were caught circling aimlessly in rainstorms after losing confidence in their sensors. A passenger named Mike Johns reported in December 2024 that his Waymo vehicle got stuck circling a parking lot while trying to reach the airport.
The car looped repeatedly, delaying his trip and raising concerns about sensor confusion—possibly triggered by the layout or weather conditions. Waymo later acknowledged the issue and said it was resolved with a software update.
In snow-heavy cities like Boston, AV testing has been repeatedly delayed because the vehicles simply can’t cope. Both cases underscore how AVs can falter when real-world complexity overwhelms their systems.
Human drivers compensate for bad weather by slowing down, using intuition, and relying on experience. AVs lack that adaptability.
The Legal And Ethical Nightmare

Even if AVs could theoretically navigate cities perfectly, the legal and ethical barriers remain enormous.
Who’s liable when an AV kills someone?
Human drivers can be held accountable for accidents. But when a robot car hits a pedestrian, who takes the blame? The software developer? The car manufacturer? The city for allowing AVs on the road?
This question is a tough one to solve—and until there is a satisfactory answer, mass adoption of AVs in cities is impossible.
The "Trolley Problem" is unavoidable. Autonomous cars must be programmed to make life-or-death decisions in unavoidable crash scenarios. Should the car prioritize the safety of its passengers over pedestrians? Should it swerve to avoid a child but risk hitting a cyclist?
These ethical dilemmas have no clear answers, yet AVs require explicit programming to act in such situations. Society has to agree on the moral framework for these decisions for fully autonomous cars to finally emerge from its legal minefield.
In 2018, an autonomous Uber test vehicle struck and killed a pedestrian in Tempe, Arizona. The modified Volvo SUV operating in autonomous mode failed to detect 49-year-old Elaine Herzberg as she crossed the street at night with her bicycle. A human safety driver was behind the wheel but wasn’t paying attention at the time of the crash.
This tragedy sparked a legal and ethical firestorm. Prosecutors eventually charged the safety driver with negligent homicide, arguing that she had been streaming a TV show on her phone instead of monitoring the road. However, Uber itself avoided criminal charges, though the company temporarily suspended its self-driving program and faced intense public scrutiny.
The case raised thorny questions about liability: Should the blame fall on the human backup driver, the company that developed the software, or the vehicle manufacturer? It remains a landmark example of how murky and uncharted the legal terrain is when humans and machines share responsibility on the road.
The Future Is "Autonomous Zones," Not "Autonomous Cities"
Does this mean self-driving cars are doomed entirely?

Not necessarily. It just faces a more complex road ahead. While the dream of fully autonomous cars navigating chaotic urban streets will never happen, limited environments show real promise.
Highways, for instance, offer consistent lane markings and predictable driver behavior, which greatly simplify the challenge for AVs. Similarly, self-driving shuttles or vehicles in gated campuses like university grounds or business parks operate in areas with known layouts and limited, slower traffic, minimizing unexpected variables.
Freight and delivery is another viable niche: autonomous trucks running long stretches between logistics hubs on fixed routes with defined schedules and fewer pedestrians can be highly efficient.
But the idea that AVs will ever replace human drivers in chaotic, unpredictable cities is no more than a fantasy.
The Limits Of AI In An Analog World
Self-driving cars are an incredible feat of engineering but they’re fundamentally mismatched with the messy reality of urban life. Cities weren’t designed for robots, and no amount of AI training can replicate human adaptability.
Until AVs can handle the infinite variables of city streets—unpredictable pedestrians, deteriorating infrastructure, bad weather, and ethical dilemmas—they’ll remain confined to controlled environments.
The future of urban transportation isn’t fully autonomous cars. It’s better public transit, smarter urban planning, and human-driven vehicles with advanced safety assists, not AI pretending it can outthink the chaos of a city.
Comments